Visión xeral do programa
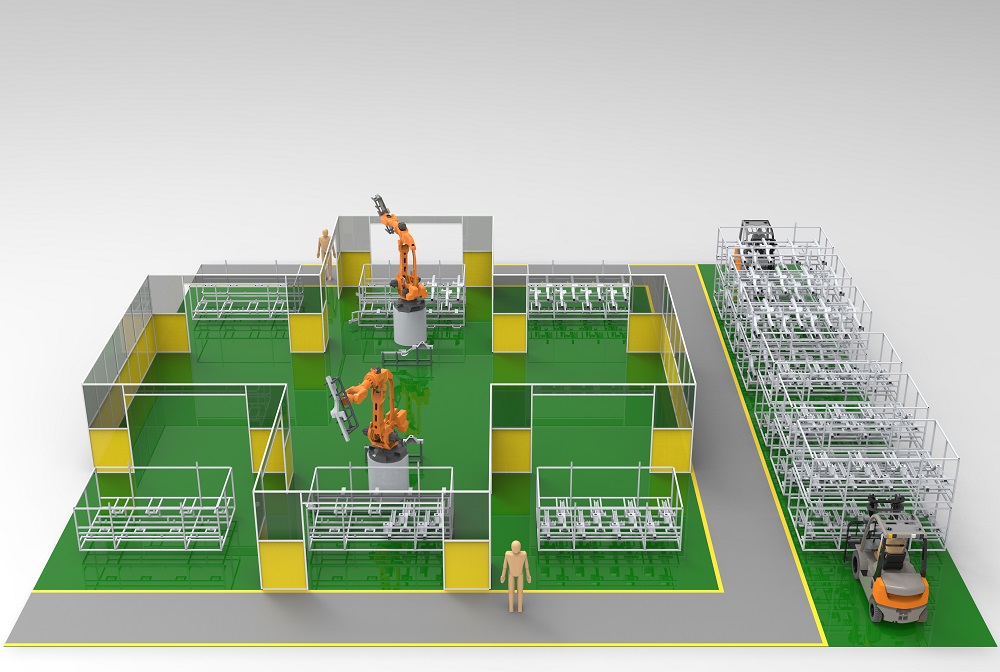
A función principal da liña de produción: liña de produción de resistencia aos impactos do carril dianteiro do vehículo e de montaxe de carcasas de rodas.
Proceso de montaxe: o carro de pezas na posición e proba: o robot coloca a peza. O HY1165A-290 colle as pezas e colócaas no carro de pezas. Cando a praza de aparcamento estea chea, solicita ao persoal que substitúa as pezas.
O proxecto consta de 2 conxuntos de HY1165A-290, 2 conxuntos de prazas de aparcamento, 2 conxuntos de agarradoiras e outras institucións.
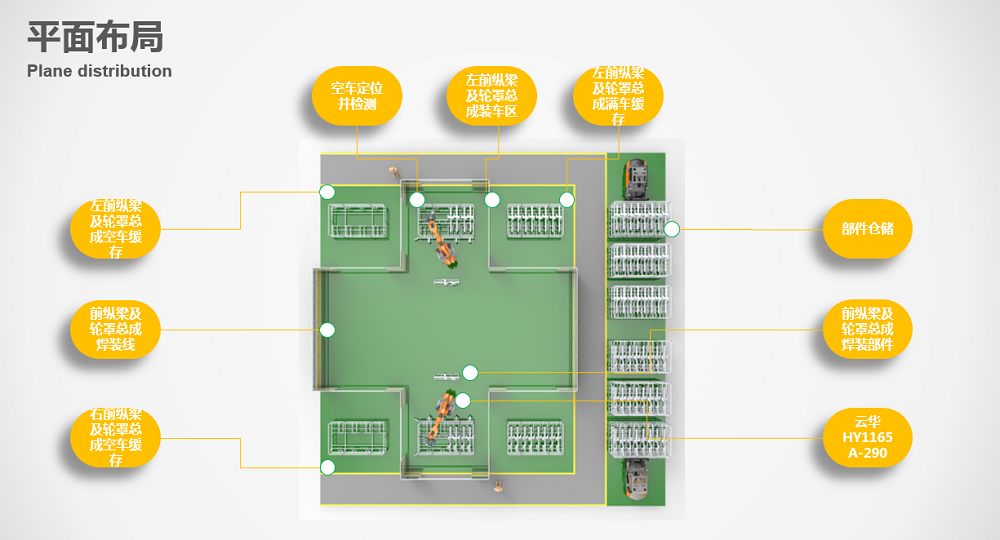
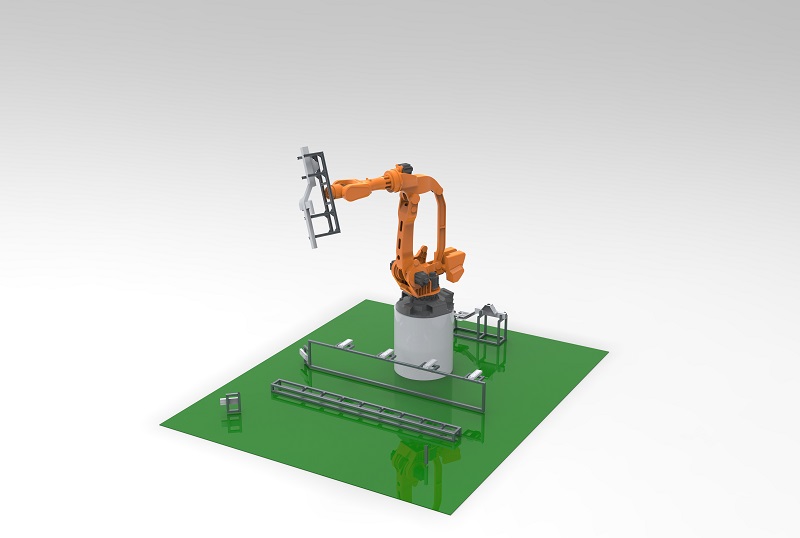
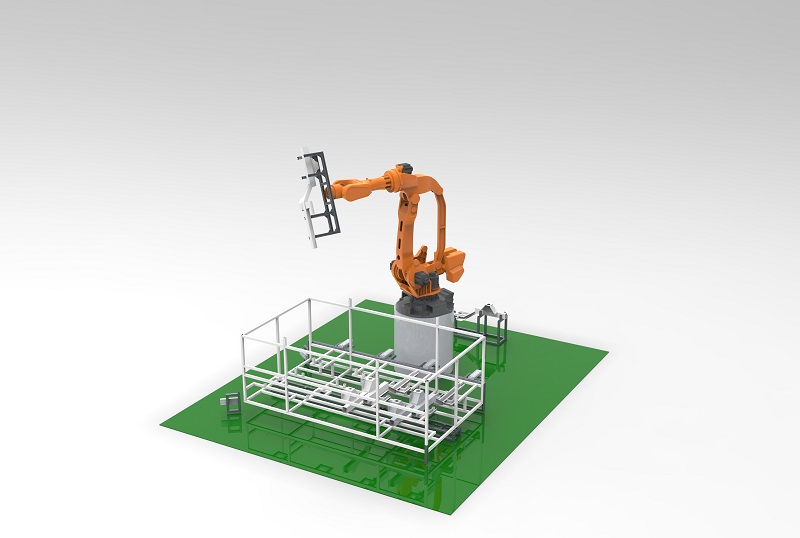
Protección de seguridade da estación de traballo, detección da eficacia da colocación de compoñentes, detección da eficacia da suxeición, detección de prazas de aparcamento baleiras.
Posicionamento e detección de vagóns de compoñentes, control de andeis de materiais no segundo andar dos vagóns de compoñentes, control de vagóns baleiros e cheos.



