Recentemente, un robot chinés deu un paso adiante cunha nova tecnoloxía ao crear unha solución intelixente para o gravado láser en pneumáticos.
O esquema está composto principalmente por un robot de seis eixes, un sistema de visión láser 3D, un sistema de gravado láser e un mecanismo de aliñamento universal de rodas McNum.
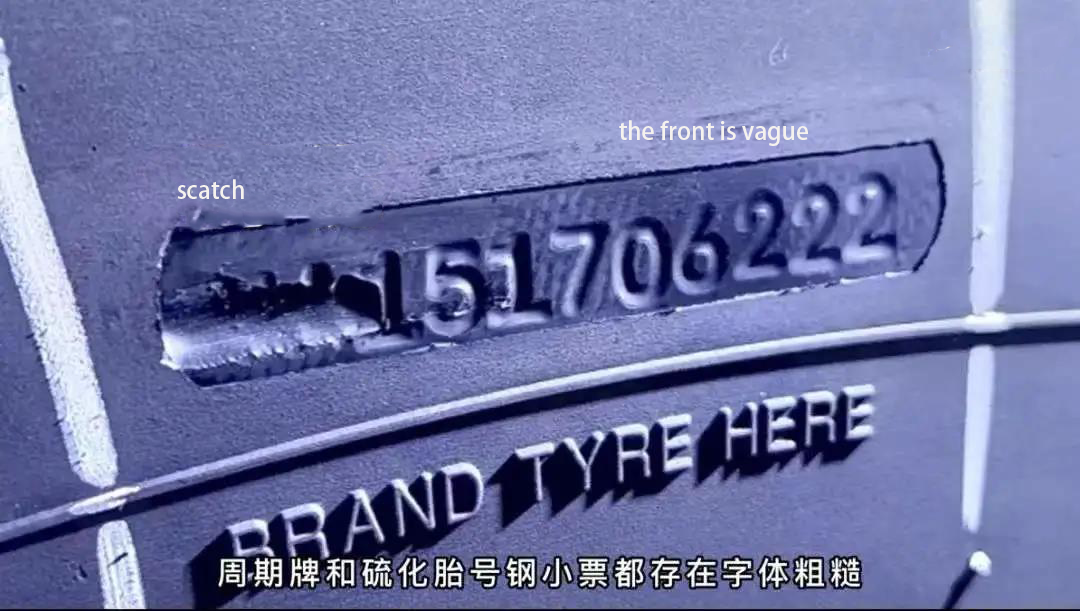
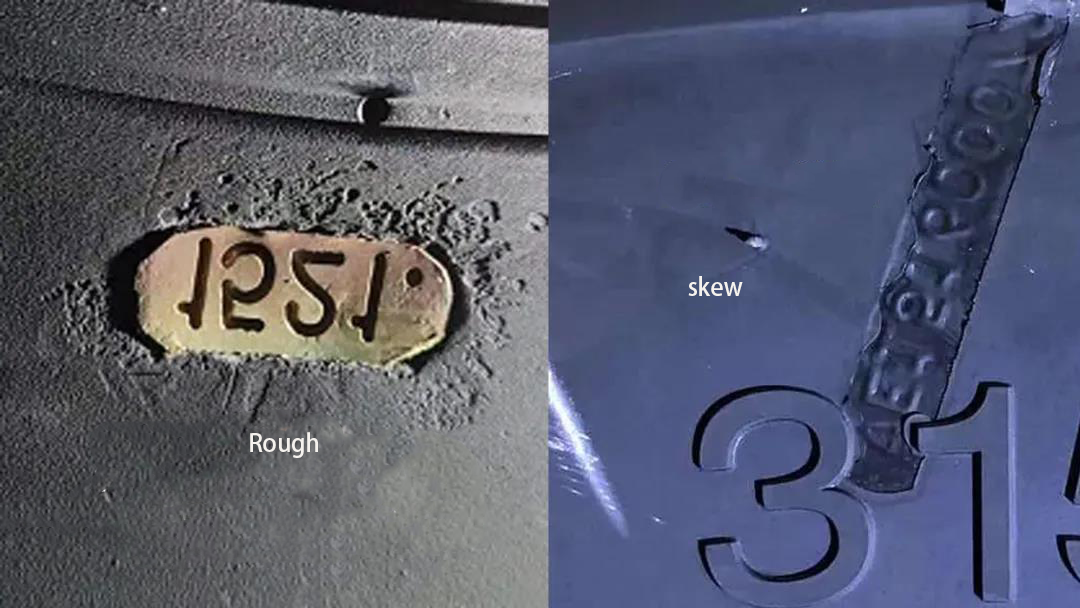
O programa emprega un novo proceso, en lugar da produción tradicional de tarxetas de ciclo integradas, recibos de aceiro e códigos de barras ocos vulcanizados, a produción da estación de traballo é rápida, gravados claros e fermosos, suaves e lisos, sen bordos de cola, etc., baseándose no cumprimento do proceso de produción, mellora considerablemente a calidade da fase do produto.
Ao mesmo tempo, en comparación co proceso de moldeo anterior, a solución pode lograr de forma flexible a personalización DIY, como a gravación de códigos QR anticanalización, lotes pequenos personalizados e logotipos personalizados.

O proceso tradicional de recepción de chapa de ciclo e aceiro leva moito tempo e é laborioso, e o custo dos consumibles é elevado. A marca de ciclo necesita parar a substitución cada semana, xa que é doado danar o molde durante o proceso de operación, a posición de instalación, a precisión do bordo de goma con fenda irregular, a produción de marca de ciclo de pneumáticos irregular, o desbordamento do bordo de goma, os danos e as proxeccións, etc., afectan seriamente o aspecto do pneumático.
Solución intelixente de gravado láser de pneumáticos, elimina o fenómeno de desbordamento da marca do ciclo, reduce a taxa de reparación, mellora a fase do produto; despídese completamente da placa de ciclo, o proceso de facturación de aceiro causado polo custo dos materiais, a man de obra e a corrección de erros, mellora a taxa de uso da máquina de vulcanización, consegue a redución de custos e a eficiencia; Pode interactuar automaticamente co sistema MES de produción, xerar datos automaticamente, pasar polo sistema MES e WMS e mellorar o nivel de dixitalización e intelixencia.
Data de publicación: 11 de xaneiro de 2022



